It's no secret that I'm a huge fan of Robotis' Dynamixel servos. I've written about them in the past (here and here), developed open source Python libraries to control them, and used them extensively in my past research. The new XM Series of Dynamixel servos are a pretty big change for Robotis...
Humanity will eventually combine sensing, computation, and actuation (ie. robots) and human biology to create more-capable human "cyborgs" (for lack of a better word). There are a number of good examples of this already: Contact lenses that change their focus, exoskeletons to provide superhuman strength, and even some special prosthetics. By and large, these advances are non-invasive.
Robotics has gotten a bit spoiled over the last 8 years in sensing; we now have low cost Kinect-style depth cameras for indoor robots and hyper-expensive laser rangefinders (LRFs) for autonomous cars that sport 30-60+ independent laser beams. But we're still lacking a commercially-available, low-cost, long-range LRF (sub-$500, 15m+ range) -- a gap that is absolutely crucial for robots doing navigation and mapping in larger indoor spaces (eg.
2015 was an insane year for robotics companies; they raised $922.7M in VC funding -- 170% more than in 2014. I'm almost certain that it exceeds $1 Billion, especially if you account for funding events in Asia (opaque to me) or if you take into account companies at the periphery of robotics (sensing, software, 3D printing, etc).
Every year MIT Technology Review announces their "35 Young Innovators Under 35" Awards (TR35 Awards). In recent years the list has included a few roboticists, and Hizook has covered several of the announcements (here, here, and here). This year is is especially meaningful for two reasons: (1) It includes three roboticists and several other individuals in machine learning and sensing; and (2) I'm one of the winners!
I share a commonly-held vision for the Internet of Things wherein mobile devices (such as robots) interact with smart objects -- objects with embedded microelectronics that perform computation, sensing, communication, energy harvesting, and energy storage. The other day, my colleagues and I published an open-access white paper that illustrates one incarnation of this vision: Robots interacting with long-range, "sensorized" RFID tags to provide IoT-style sensing -- i.e.
While walking around the Bay Area Maker Faire this weekend, I stumbled across an amazing piece of technology: Valve's "Lighthouse" tracking system. Valve's demos were (supposedly) a major contributor to Oculus' fundraising efforts and ultimate sale to Facebook, and this device may have been a key piece of those demos. I'd heard rumors about this system for many months.
I just completed my annual tally for VC funding in robotics in 2014, and the results were pretty amazing. By my primitive calculations, VC funding for robotics increased over 36% compared to 2013 -- totaling a whopping $341.3 Million for 2014. I'll tentatively ascribe the massive gains to: (1) A frothy funding environment; (2) Lots and lots of drone startups; and (3) A series of later stage medical robotics companies raising large sums.
A few years back I learned about an actuator that is surprisingly simple, has a high gear ratio, was known since ancient times, and can be produced with nothing more than a cheap hobby motor and some string. Crazy, right?! Up until recently I was barred from discussing the actuator due to NDAs with an anonymous startup, despite plenty of academic work on the subject. Thankfully those NDAs expired, and I've received permission to discuss some of that company's findings publicly.
Back in January 2014 I purchased an Anki Drive "robot car" setup, along with an iPad to control it. I had high hopes. Anki had a great story: originated in CMU's robotics program; raised $50M in VC funding (now more than $105M); and launched at Apple's WWDC conference in 2013. It was touted as "bringing robots out of the lab and into homes, using real AI." I couldn't wait to get my hands on one -- to try it out and to tear it apart to figure out how it works.
This weekend a new Disney movie came out in theaters: Big Hero 6. I'm super excited for this movie, and I'm sure it will be awesome! Even better, the main supporting character is a big, soft inflatable robot named Baymax. As long-time readers of Hizook will undoubtedly know, I'm a huge proponent of inflatable robots -- they have challenges, but they're tough to beat in terms of cost and power-to-weight ratio!
My good friend Erik Schluntz and I came up with this really cool idea: We should build room-sized 3D printers using winch robots (also called cable robots or rope robots) instead of using big 3-axis gantry systems. The idea has a lot of merit: eliminate bulkiness, vastly-lower robot cost, insanely-big workspaces, and super-easy installation and calibration. We thought a bit about what it could look like as a business (eg. launching via Kickstarter), but opted to pass for the time being.
Several of my friends attended Automatica 2014, where they saw demonstrations of the LogiMover pallet-moving system by Eisenmann. They figured I would be interested (yep!), and emailed me some details. LogiMover has an interesting design twist: It uses two independent forks (ie. two distributed robots) to lift and move pallets around a warehouse or factory floor.
This is becoming something of a perennial topic for Hizook; the 2011 and 2012 lists were a hit, and people keep asking me about 2013. Let's keep the tradition alive. Robotics companies raised at least $250 Million in 2013, which compares very favorably to the $190 Million from 2012.
A few of my robotics friends (Issei Takino, Huan Liu, and Rosen Diankov of OpenRave fame) quietly started a company in Japan called Mujin that is modernizing old-school manufacturing. Mujin uses modern software and interactive motion controllers to help large manufacturers update their production lines (using decades-old robots) in drastically shorter times compared to what would be required using crummy old motion-jogging panels. By most accounts, this is boring non-flashy robotics work.
Giant 3D printers are cool, but they have fundamental limitations: the parts they can build are limited to the volume of their finite workspace. Let me propose an alternative. What if we gave mobile manipulators a "toolbelt" of rapid prototyping utensils so that our general purpose (home!) robots are effectively on-the-spot machinists capable of building almost any CAD design?! Actually, there's some compelling evidence that we're closer to this vision than one might imagine.
Over the years I've been keeping an informal list of large rapid prototyping systems. I'd like to take a moment to share some of these, including: big 3-axis systems that print plastic, sand, or cement; large robot arms with extruders and milling bits; and large industrial arms for bending metal and assembling modular structures. This list is woefully incomplete, but it provides some fun eye candy. Enjoy!
Due to the popularity of Hizook's list of VC Funding for Robotics in 2011, we figured folks would be curious how 2012 fared in comparison.... and the news is promising! By our tally, robotics companies raised ~$190 Million (breakdown below) in VC funding in 2012 -- approximately the same amount as in 2011, though it'll probably be more once folks speak up in the comments (please do!).
Some people have been asking, "Travis, where did you (and Hizook) disappear to?" Well... I'm taking a prolonged (but ultimately temporary) hiatus from robotics to co-found a new, YCombinator-funded web startup: Lollipuff.com -- an online auction site dedicated exclusively to women's designer clothes and accessories, where every item is authenticated by a team of experts. Surprised? Frankly, I am too. I'll explain more down below...
Underactuated robot hands -- with fewer motors than joints -- have been around for decades; however, we've seen a surge of new designs in recent years. Personally, I attribute this trend to the availability of low-cost robot arms and associated open-source software (ie. ROS). In any case, underactuated hands offer numerous advantages in terms of cost, size, weight, and mechanical / electrical complexity while providing a large array of shape-adaptive grasps.
I'd like to introduce you TechJect (a Georgia Tech spinout) that is building a robot dragonfly based on of years of academic research and $1+ Million in military funding -- aka, one hell of a toy! Early prototypes look pretty compelling (see photos and videos below).
Today, Suitable Technologies announced the "Beam Remote Presence System" -- aka, Beam telepresence robot. You can see the press announcement below, and find plenty of commentary elsewhere online (eg. about how the $16k price tag compares to competitors). Normally, I'd write a similar reaction piece. But instead, I'm going to violate two of my personal rules: I'm going to write a negative piece on Hizook, and I'm going to do it while somewhat mad.
Rethink Robotics (formerly Heartland Robotics) has come out of stealth mode with the announcement of Baxter -- a $22,000 dual-arm, human-scale robot with compliant joints. The details are available in Rethink Robotics' Baxter datasheet and brochure, but here are a few key highlights: dual 7-DoF arms with 5 lb (2.3kg) payload with a max no-load speed of 3.3 ft/sec (1m/sec). The arms are compliant owing to series-elastic actuators (SEAs) with force control and torque sensing at each joint.
I love Artaic. They're revolutionizing a millennia-old art form (tile mosaics) using dead-simple pick-and-place robots, to create a successful "non-robotics company." Yet in my mind... they're the quintessential "robotics" company. I had cause to visit their headquarters in Boston last March, where I got a special tour by Artaic co-founders Paul Reiss (Creative Director) and Ted Acworth (CEO).
Like many readers of this site, I’m planning to start a robotics company. So when I saw Hizook's list of VC Funding in Robotics in 2011, it cried out to me: Who is investing in robotics? And how can I get some of that VC money? I did a bit of research to identify the robotics-friendly venture firms behind Hizook's list, with the hope of understanding how capital is allocated in robotics.
Peter W. Singer is arguably the most famous scholar of drones and robotic warfare today. His book Wired for War probably did as much to introduce unmanned aircraft to the popular consciousness as any single work. His article in the Atlantic on July 19th blew a huge opportunity to advance the discussion of unmanned aircraft regulation.
Movies and scifi books inspire roboticists to push the envelope, but they've also skewed the public's perception of robot capabilities. This problem is being exacerbated by researchers. In the last three months, I've had to shatter a few dreams: "Your $300 AR.Drone or $150 Ladybird will not be able to perform insane autonomous aerial maneuvers (yet).
I have lots of love for Pittsburgh in particular, but it really pisses me off when people on the East Coast repeat a bunch of falsehoods (See #8) about how Boston and Pittsburgh compare to Silicon Valley and the rest of the world. Many people in Pittsburgh and Boston—including people I call friends and mentors—smugly think that the MIT and CMU centered robotics clusters are leading the world in robotics. This is demonstrably false.
Redwood Robotics came out of its year-long stealth mode at today's Xconomy event in Menlo Park, California. Redwood Robotics is a joint venture between three west-coast robotics powerhouses: Meka Robotics, Willow Garage, and SRI. Aaron Edsinger, who is CEO of Meka Robotics and is expected to take a leadership / executive role at Redwood, made the announcement and explained the startup's goal: "To enable the personal and service robot markets through a new generation of robot arms that are...
Artisan's Asylum is a hackerspace startup in Boston, MA that is hosting classes to build big, bad-ass robots. Their first course set out to build 300-lb autonomous "vending machine robots." That class is winding down, so they're starting a new project: a 2500+ lb. ridable hexapod "spider" robot named Stompy.
It seems like robotics companies are being acquired left-and-right. Just the other week we learned of two more: (1) My Robot Nation, which allows you to design and 3D print custom robot figurines, was acquired by 3D systems. (2) Sensable Technologies, which is best-known in robotics circles for their "Phantom Omni" haptic interfaces (eg. for teleoperation), was just acquired by Geomagic.
We were scanning through the upcoming ICRA2012 program and noticed an interesting paper titled, "Resonant Wireless Power Transfer to Ground Sensors from a UAV." This certainly piqued our interest -- especially for Travis, who happens to work with wirelessly-powered sensors at his day job. Come to find out... the article is by Dr. Carrick Detweiler, PI of the NIMBUS Lab at the University of Nebraska-Lincoln (our undergrad alma mater!).
As FutureBots Labs' solo roboticst, Dan Mathias has been toiling away for almost 10 years to develop humanoid robots (such as the ATOM-7XP humanoid) out of his lab. Today Dan has a special announcement: FutureBot Labs has developed a new humanoid robot named KATE, the "Kids Avatar Teacher and Entertainer." We're highlighting Dan's latest robot for three reasons: First, FutureBots is trying to become a legit robotics business with real products for entertainment, education, research, and...
Legal subtleties will naturally arise as robots become increasingly ubiquitous. Hizook touched briefly on this topic back when we discussed ISO safety standards for robotics. However, this topic deserves additional attention. It's a touch-and-go issue: It's important not to burden a burgeoning industry with premature regulations, but at the same time, accountability is a serious issue -- especially as robots enter our homes.
Hizook was first to cover the Robotiq's unique 3-fingered Adaptive Robot Gripper back in 2010, even before it became a commercially-available product. Since then, that gripper has been spotted on a number of robots, appeared in a TV commercial, and been used in numerous robotics research projects that needed a rugged and dexterous robot hand. Today, we're happy to share the news that Robotiq has a new, upcoming product: a simplified, 2-fingered version of the Adaptive Gripper.
It seems we're going to have a new DARPA Grand Challenge! The BAA with formal details should be out very soon, but for now we're bringing you the unofficial, preliminary details based on notes from Dr. Gill Pratt's talk at DTRA Industry Day: The new Grand Challenge is for a humanoid robot (with a bias toward bipedal designs) that can be used in rough terrain and for industrial disasters. The robot will be required to maneuver into and drive an open-frame vehicle (eg.
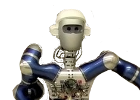
Meka Robotics is renowned for their humanoid robot, the M1 mobile manipulator with omnidirectional wheeled base. However, Meka also has a number of joint collaborations with research labs that have resulted in some cool, new robotic technologies. First up, Meka teamed up with Luis Sentis' Human Centered Robotics Lab at UT Austin to design and build a new legged biped, named Hume, for rough-terrain locomotion.
Amazon.com just announced that it was acquiring Kiva Systems for $775 Million in cash. Kiva Systems is one of my favorite "companies that employ robots" (rather than "robotics companies" -- there's a big difference). Kiva is all about improving warehouse logistics and fulfillment, and they happen to employ a large swarm of robots (see video below) to accomplish this. Namely, they use robots to autonomously fetch and arrange "pods" so that human pickers can more efficiently fill orders.
Animal behavior scientists strive to understand why and how animals do the things they do. Up until recently, scientists had to rely on natural observations -- fortuitous encounters or staged interactions. But advances in biorobots (mechanical robots that mimic live animals) are giving scientists unprecedented control over experimental variables, allowing them to run studies that would be unfeasible (or dangerous, or inhumane) in the course of normal research.
I've been tracking venture capital (VC) funding of robotics companies for the better part of two years. Based on my (limited) data, VC funding in robotics exceeded $160 Million for 2011. This is just a rounding error compared to VC funding of Internet (web-based) companies, which hit a decade-long high of $6.9 Billion in 2011. My hope is that robotics will get more love in the next year(s), but getting VC funding for robotics is a decidedly tough nut to crack.
I just received word from Berthold Bäuml, a lead scientist in realtime dynamic motion planning at DLR, that they've developed a new humanoid robot named "Agile Justin." Agile Justin is very similar to Rollin' Justin (the ball-catching, Pulp Fiction-dancing robot), except that it has improved dynamic performance. To test the new hardware, DLR researchers have programmed Agile Justin to throw a baseball.
I'm a huge fan of TED Talks -- high production quality talks given by the world's thought leaders, recorded and distributed for all after the annual TED conference. I've noticed that robotics is a perennial hot topic, so naturally I thought: "I should build a compendium of TED talks about robotics (all on one page)." And so here it is... all 21 of the TED talks that have graced the TED.com frontpage to date. But alas, TED has expanded beyond the confines of the annual (expensive!) conference.
There are many cool tech toys on the market... But Cubelets make building robots quick and fun. Cubelets are a new robot construction kit from Modular Robotics. Snap these small magnetic blocks together, and without further ado your robot starts to sense, plan, and act.
iRobot has received ample attention for their particle jamming innovations (ie, the "Jamming Blob Robot" and "Jamming Gripper"), created under the now-expired DARPA Chembot program. However, if you're like me, their particle jamming actuators and hexapod "JamBot" probably alluded your attention -- and they're stinkin' cool!
I'm really excited about inflatable robots... they have the potential to be low-cost, lightweight, extremely powerful, and yet "human safe" -- ie. perfect for many robotics applications. With that in mind, I would like to introduce you to two new (breakout) inflatable robots: a 15-foot-long walking robot (a Pneubot named Ant-Roach) and a complete, inflatable robot arm (plus hand).
This article is specifically for folks in academia... When writing a journal paper, targeting the right venue is an important consideration. There are lots of factors that go into this decision: audience, prestige, historical topics of interest, turn-around time, open access, etc. Discussing all the considerations in detail is too taxing and is probably not actionable (it's too dependent on your research and goals). But I thought I'd share...
I would like to introduce you to a new "elastomeric rolling robot" -- a soft robot made of inflatable, silicone actuators that pressurize in sequence to make the robot move. This new robot hails from MIT's Distributed Robotics Laboratory and has a major distinguishing feature compared to other soft robots: it is entirely self-contained -- no more off-board electronics or pneumatics; everything is on-board.
Vibrobots (and bristlebots) are simple robots that use a tiny pager / cellphone vibrator motor (with an eccentric weight) to randomly bounce around -- they are the subject of many Maker / DIY projects as well as some well-known commercial toys (such as the $7.00 Hexbug Nano).
It's that time of year again... MIT Technology Review announced their 2011 "Young Innovators Under 35" Awards (TR35). This year two roboticists are among the recipients: Brian Gerkey and Pieter Abbeel. Brian Gerkey is currently the "Director of Open Source Development" at Willow Garage, where he architects ROS (the Robot Operating System). ROS is quickly becoming the world's standard robot software platform, supplanting Player --which was also developed by Brian.
The Swarmanoid project is a cool twist on swarm robotics -- researchers use a heterogeneous swarm of robots to achieve distributed mobile manipulation. The swarm is comprised of three different robot varieties: Hand-Bots (manipulation and climbing), Foot-Bots (wheeled mobility and sensing), and Eye-Bots (quadrotors for recon and sensing).
News just broke on XinHuaNet (via Slashdot) that Foxconn, a Taiwanese company with more than 1M Chinese laborers on the mainland, plans to deploy one million robots(!) over the next three years -- a 100-fold increase over current numbers. This should serve as a wake-up call for the United States. China already dominates in manufacturing; if they can capture the "new" flexible, light manufacturing space too, then the United States will be in dire straits (National Robotics Initiative or not).
Robotis has just announced a new line of Dynamixel Servos: the MX-series, beginning with the release of the MX-28. The MX-28 servo has some distinct improvements over its RX-28 brethren: 12-bit (0.088°) angular resolution (four times that of the RX), full 360° controlled rotation (rather than 300°), non-contact magnetic encoders (not subject to mechanical wear), etc.
ICRA 2011 kicks off in less than two weeks in Shanghai, China. Unfortunately, I won't be attending -- I'll have to wait to see y'all at IROS 2011 in San Francisco come September. However, I was browsing through the program and it looks like there are going to be a lot of great talks!
Carol Reiley, a surgical robotics PhD student at Johns Hopkins' Computational Interaction and Robotics Laboratory, wrote in to share how they unwind after a long day of research. She writes, "Here's a video of the Johns Hopkins Robotics lab playing the board game Operation on the $1.3M dollar (Da Vinci Surgical) robot. The video emphasizes the robot's precision and hand tremor reduction as well as how difficult Operation is to play, even with a robot. :-)" Fun, whimsical, and a bit meta.
Perhaps you remember Garratt Gallagher -- he's the ROS / Kinect hacker responsible for 30% of all entries in the recent Kinect / ROS 3D competition, in which he won first place for Impromptu Buttons (his other entries such as Finger Detection, People Follower, Kinect Minority Report Interface, etc. were also quite impressive). However I want to introduce you to his most exciting project to date: Bilibot.
I'm intrigued by several recent high-tech robot toys that provide an immersive, augmented-reality experience that is grounded in a real, physical robot. Almost universally, these new toys are controlled by smart phones or tablet computers (eg. iPad / iPhone / iPodTouch or Android devices) and will likely be hacker / developer friendly. They are becoming increasingly sensor-rich and often offer video feedback -- all enabled by the commoditization of robotic components.
This is a guest essay by Fred Nikgohar. Fred is the CEO of RoboDynamics, makers of the TiLR robot which was recently featured in a New York Times overview of telepresence robots. Fred argues that we've reached a watershed moment in robotics facilitated by cheap 3D sensors like Microsoft's Kinect (ie.
I would like to introduce you to iRobot's latest prototype: a new telepresence robot named AVA that was unveiled this week at the Consumer Electronics Show (CES 2011) -- see the video below. Through AVA, iRobot intends to explicitly leverage the proliferation of tablets / smart phones and their associated app stores.
Many folks visiting Hizook today are looking for a "robot coffee machines," specifically, the Tassimo BrewBot by Bosch. In actuality, BrewBot is not a robot at all! They are using a cute robot coffee machine to sell decidedly non-robot coffee makers, and it makes me sad... I want the actual robot! Either way, kudos to the clever marketers at Bosch for making such a great commercial (embedded below).
Take a moment and envision an electromagnet: a simple coiled wire driven by a hefty electrical current gives a fully-programmable magnetic field strength (on, off, and everything between). Electromagnets are ubiquitous, but it turns out that there is a little-known device with similar functionality yet zero static power consumption -- they are called electropermanent magnets, and they've been around and in use since the 1960's!
Heartland Robotics, the stealthy robotics startup founded by iRobot co-founder and robotics legend Rod Brooks, was in the news again last week after closing a $20M financing round. Little is known about the company beyond broad superlatives from executives about building robots to "increase productivity and revitalize manufacturing." Now, successful fundraising by a robotics startup is great news, but alone it was insufficient to draw my laser-focus away from thesis work.
After many years of searching for the perfect telescoping linear actuator, I would like to share my discovery of the I-Lock Spiralift 75 (ILS75) prototype by Paco Spiralift. The ILS75 has a compact form factor (10x15x15 cm) that can telescope out to 1.6 meters while lifting a 175kg load (350+ lbs). It relies on a system of interlocking horizontal and vertical metal bands that "unroll" to lift a load, a process best illustrated in the videos embedded below.
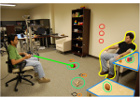
A few weeks ago, my labmates from Georgia Tech's Healthcare Robotics Lab presented a paper at IROS 2010 entitled, "Towards an Assistive Robot that Autonomously Performs Bed Baths for Patient Hygiene." Their work used Cody, a robot with compliant arms, and a specialized "bath mitt" end effector to perform wiping motions that could clean selected areas of an actual person's body, including the upper arm, forearm, thigh, and leg.
KUKA has developed an impressive array of omnidirectional robot platforms: OmniMove, OmniRob, and youBot. A new video on the youBot Store shows how an OmniMove holonomic base (containing eight mecanum wheels) can be transformed into a seriously heavy-lifting mobile manipulator through the addition of a huge Titan robot arm, which has been called the "world's strongest robot arm" and is capable of lifting 1000 kg.
Apparently novel robot end-effectors are popular this week (see the particle jamming robot grippers), as we've spotted another: a previously-unseen robot gripper from SRI International that uses an electrically controlled reversible adhesion called electroadhesion. We've looked at SRI's electroadhesive wall-climbing robots before, where electrostatic forces are able to support extreme loads with relatively little power consumption.
Remember that compliant "jamming" end effector unveiled by Colin Angle (iRobot CEO) at TEDMED 2009? Even then, it was demonstrated picking up medication bottles, keys, and water bottles (a hand-held version was also demonstrated). Well, it just got a whole-lot more official with the publication of "Universal robotic gripper based on the jamming of granular material" in the Proceedings of the National Academy of Sciences (PNAS).
Dejan Pangercic of the Intelligent Autonomous Systems Group at TUM (Technische Universität München) wrote in to show us a cool dual-robot demonstration where a PR2 robot (TUM's James) and TUM-Rosie combine their efforts to prepare and deliver pancakes -- Yum! The demonstration system is quite impressive, featuring: door and drawer opening, object recognition, grasping and manipulation, navigation, multi-robot cooperation, etc.
Yesterday Georgia Tech's PR2 robot made a LIVE appearance on CNN. The event was accompanied by interviews of Dr. Charlie Kemp (director of Georgia Tech's Healthcare Robotics Lab and my advisor) and Keenan Wyrobek (Willow Garage figurehead). Travis Deyle (yours truly) was also present and responsible for the robot demonstration.
Tonight's episode of Big Bang Theory, a comedy sitcom about CalTech scientists / engineers, prominently featured a telepresence robot as "Shel-Bot." Specifically, the show featured Willow Garage's telepresence robot called Texai that was covered in the NY Times just a few weeks ago. Apparently this is the second robot appearance in Big Bang Theory's new season (one in each of two new episodes) -- though I have yet to watch last week's episode with a "gratifying" robot manipulator.
There is an interesting article in the Seattle Times about former Microsoft robotics evangelist, Tandy Trower, launching a new startup named Hoaloha Robotics. His goal is to create a $5k-10k personal robot (aka mobile manipulator) in the next five-to-ten years that can address the needs of older adults, such as telepresence activities and other healthcare tasks.
I would like to point out two news items involving telepresence robots that are definitely worth reading. First, a "manifesto" reprinted from the June 1980 issue of Omni magazine where artificial intelligence pioneer, Marvin Minsky, shares his views on telepresence (a term he originally coined). His essay includes a prediction of remote avatars (ie.
By now, you're probably familiar with the Nao humanoid robot from Aldebaran Robotics -- the robot that supplanted the Sony Aibo as the robot du jour for Robocup's Standard Platform League (international robot soccer competition) back in 2007 and retains that prestigious title yet. Recently, Aldebaran announced a new Educational Partnership Program that aims to expose students of higher education to the joys of programming advanced robots.
Apparently my hunch about the recent humanoid being the standard platform for the DARPA Autonomous Robot Manipulation Software (ARM-S) program was spot-on! A new blog post on ROS.org confirms that this is the DARPA "ARM Robot" and that there is a public contest to name the robot. The blog post gives a few hardware details: "The 'ARM Robot' has two Barrett WAM arms, BarrettHands, 6-axis force torque sensors at the wrist, and pan-tilt head.
Dr. Motilal Agrawal from the Artificial Intelligence Center at SRI International just sent an email to the robotics worldwide mailing list seeking qualified PhD or Masters job candidates (or interns) with experience in ROS, C++ / Python, and grasping / manipulation. In the email, Dr. Agrawal points to a movie that shows off a new humanoid robot being used at SRI that sports dual Barrett WAM arms, each with a Barrett three-fingered hand -- see the movie embedded below.
I just stumbled across an amazing new video (embedded below) from Howie Choset's Biorobotics Laboratory at CMU of a teleoperated snake robot climbing a tree. While I have seen a lot of snake robots built over the years, including some amphibious versions that can swim, this is the first time I have seen one climbing a tree -- a task that some biological species do amazingly well!
Dr. Aaron Dollar of Yale's GRAB Lab was recently awarded the prestigious "MIT Tech Review 2010 Young Innovators Under 35" award, better known as TR35, for his work on building flexible robot hands through shape deposition manufacturing (SDM). The SDM process allows multiple materials to be integrated into a single mechanism, including soft finger pads, compliant joints, rigid members, sensors, and even tubes to run wires and cables.
Today Velodyne Lidar introduced the HDL-32E, a new laser rangefinder with 32 simultaneously-operating laser beams that cumulatively output up to 800,000 points per second. The new laser rangefinder provides full 360° scans at up to 20 Hz with ranges from 5 cm to 100 meters and a vertical field of view from +10° to -30° (datasheet).
While Willow Garage made an important announcement about the forthcoming commercial availability of PR2 robots earlier this week, I want to focus your attention on something a bit more whimsical. At the PR2 launch party, Willow Garage founder (Scott Hassan) was throwing around the idea of a PR2 video competition for PR2 Beta Program recipients, complete with substantial cash prize. True to his word, Scott set up a rules / video submission site; in a nutshell: the competition deadline was Aug.
Two weeks ago, Engadget / CrunchGear posted videos of RAPUDA (Robotic Arm for Persons with Upper limb DisAbilities) from AIST's Intelligent Systems Research Institute -- a wheelchair-mounted, light-weight robot arm with a prominent telescoping link that was demonstrated grasping a cup from a table, lifting the cup for drinking, and grasping an object from the floor via teleoperation (video embedded below).
Electrotactile arrays are a lesser-known form of human-machine interface (HMI) that apply electric current to skin-contacting surface electrodes to excite cutaneous nerves and give the illusion of texture, pressure, or pinpricks (depending on current strength and electrode resolution) all without mechanical vibration.
PlasticPals just pointed out DLR's 10-month effort to build a biped robot -- an effort that yielded a 1-meter, 50kg walking robot (video below). Mechanically, each leg has six degrees of freedom. A DLR / Kuka Light-Weight Robot (LWR) arm segment comprises the upper-leg, and a custom lower-leg segment connects to the foot through a six-axis force-torque sensor. Realtime control algorithms and dynamic simulations are performed using OpenHRP3 and Simpack.
I recently learned that the holonomic mobile base developed at the University of Bonn's Autonomous Intelligent Systems Lab (NimbRo@Home) for the Dynamaid robot has become commercially available. It is officially called the VolksBot Omni and is being sold in Fraunhofer's VolksBot line for 9000 EUR (~$11,700 USD).
In our first request for assistance, we asked you to contribute / submit articles related to your own projects, ideas, and research. Here we'll ask you to consider these other methods of lending Hizook a hand: Provide a modicum of financial support by using Hizook's affiliates (eg. Amazon and Trossen Robotics) when making robotics purchases; Enroll for a Hizook user account; Or just become an active commenter.
I'm consistently surprised by the outpouring of support and enthusiasm from you, our Hizook readers, about this site and its content -- it's abundantly clear that academic and professional roboticists would welcome a commons for informal, yet educated, robotics discussions outside rigid peer-reviewed conference and journal settings. Hizook was founded to fill that role.
NASA's $2.3B Mars Science Laboratory (MSL) robot known as Curiosity took its first test drive on Friday inside a NASA cleanroom, moving about 1 meter. As the successor to two wildly successful Mars rovers (Spirit and Opportunity), NASA has high hopes for Curiosity, which weights as much as a small SUV, has a six-wheel rocker-bogie suspension about waist height, and is nuclear powered via a radioisotope thermoelectric generator (RTG).
Perching is one of the most common aerobatic maneuvers executed by birds and is representative of a large and important class of aggressive aerial maneuvers that take advantage of unsteady aerodynamics. During a perching maneuver, birds often exceed 90 degrees in angle-of-attack, exploiting both viscous and pressure drag for rapid deceleration.
CNET's Road Trip 2010 series dropped by iRobot HQ, where "Cool Stuff" is aptly emblazoned on the doors. They snapped a number of interesting photos of lesser-known iRobot history / robots, including: underwater gliders, previously unseen chembot prototypes, and Landroids (mini-Packbots).
I recently became aware of an effort by ISO (International Organization for Standardization) to define a standard for domestic service robots -- more specifically, ISO-13482 "Safety requirements for non-medical personal care robots." I must confess having mixed feelings about this development. On one hand, it is exciting that the personal robotics revolution is near-enough at hand to warrant the definition of a standard -- there are many standards for industrial robots (eg.
FastCompany spotted a new version of HERB (Home Exploring Robot Butler) at the CMU Quality of Life Technology Center. HERB is a joint effort between Intel Research's Personal Robotics Program and Carnegie Mellon University. The new version sports two Barrett WAM arms on a Segway RMP mobile base and has a very distinctive rotating (instead of tilting) planar laser rangefinder.
Hizook previously covered a number of DARPA Chembot projects, including Dr. Hong's Whole-Skin Locomotion (aka amoeba robot) and the IRobot Jamming Skin Robot (aka "blob bot"). The original blob bot was rather creepy, but researchers from IRobot, MIT, and Harvard have ameliorated the situation by creating a decidedly non-creepy successor: a Chembot with soft (silicone?) selectively-inflatable body segments for locomotion.
Back in late March, Hizook provided an overview of various depth cameras (aka range cameras, 3D cameras, time-of-flight cameras, RGB-D cameras), including the PrimeSense solution now known to be the basis of Microsoft's Kinect (formerly Project Natal). In the last 3 months, the depth camera space has seen numerous updates, such as additional commercial offerings and product updates / availability.
Back in 2006-2007, a dynamically-stable robot named TBot was developed at the Florida Institute for Human and Machine Cognition (IHMC) by a team of professional roboticists. Financed by a now-defunct DARPA program, the goal was to create a a robot capable of fast transportation in open areas and precision operation in tight urban combat scenarios.
We've seen snack-carrying and coffee-fetching robots on Hizook before, but the BlueBotics Nesbot really speaks to my over-caffeinated heart. Nesbot is an autonomous mobile coffee machine whose sole purpose is to take my web-based order, autonomously locate me (via BlueBotics' ANT navigation system), and deliver my choice of six blends -- and remember, I prefer strong espressos!
This week KUKA Robotics is demonstrating their latest product offering at the Automatica conference in Munich: the youBot robot. YouBot is a mobile manipulating robot with a 5DOF arm coupled to a mecanum omnidirectional base -- essentially the same product that Hizook predicted when the individual components were being demonstrated at IROS 2008.
At Willow Garage's week-long PR2 training workshop, each of the eleven recipient institutions gave a 15-20 minute talk highlighting their planned research activities on the PR2. On Monday, with a little help from yours truly, the first beta-site spotlight (of Georgia Tech) was posted on the WG blog -- complete with recorded video from the training workshop talk by Prof. Charlie Kemp (of Georgia Tech's Healthcare Robotics Lab). Today, the spotlight for UC Berkeley (with video) followed.
The curious robotic creation pictured below is called the Roomba QuadDrive, and hails from the University of Bonn's Autonomous Intelligent Systems Lab (NimbRo@Home). The Roomba QuadDrive is an omnidirectional mobile robot base of the powered caster variety with one obvious (whimsical) characteristic: it uses four IRobot Roomba 530s as the drive motors, each paired with a Robotis Dynamixel RX-64 servo for steering!
The Boston Globe has unearthed another solid player in the remote presence (sometimes referred to as mobile telepresence or mobile videoconferencing) game. This time, it is the Vgo (pronounced Vee-Go) robot from Vgo Communications. Apparently Vgo Communications was founded in 2007 by Tim Root and has upwards of $8M in venture capital funding. The Vgo robot is pretty sleek with a nice cosmetic shell, though it seems a bit vertically challenged.
On Wednesday night, midway through a week-long PR2 training workshop, Willow Garage held a press conference and party celebrating the launch of the PR2 Beta Program, essentially signifying the completion of their Milestone 4. The night featured speeches by Willow Garage founder (Scott Hassan), CEO (Steve Cousins), and Personal Robotics Program co-founders (Keenan Wyrobek and Eric Berger).
Last week Willow Garage kicked off its official PR2 Beta Robot Workshop, where approximately 50 robotics researchers from the 11 PR2 recipient institutions gathered to become familiar with ROS on the PR2, hack on the robot alongside Willow personnel, and have plenty of stimulating robotics discussions. Attending as a grad student in Georgia Tech's Healthcare Robotics Lab, I had a front-row seat to this enjoyable but grueling event.
On Thursday, Meka Robotics uploaded a video showing off their latest "coming soon" product, the G1 robot gripper. While the price and specs are still unknown, the patent-pending parallel-jaw design with independent finger actuation looks interesting -- a great addition to their product lineup. Be sure to check out the video embedded below.
I finally took a few minutes to watch a tear-down of the Roomba 4000 Series vacuum cleaner by Dino Segovis of DinoFab.com. The 20-minute two-part video (embedded below) provides a pretty solid look at the design considerations that went into making the Roomba both robust and low-cost.
At IROS 2009, IRobot demonstrated an interesting form of locomotion dubbed "particle jamming skin" (to create what became known as the "blob bot"). The robot was creepy, but the concept was interesting. In a recently available TEDMED 2009 talk (embedded below), IRobot CEO Colin Angle describes a unique particle jamming end effector (robot hand) for manipulation.
Back in October 2009, Colin Angle spoke at TEDMED 2009. It was a big announcement: IRobot was launching a new healthcare robotics business unit to be led by Tod Loofbourrow. Their ambitious goal: add 1 million years to users' lifetimes through robotic assistance. Some good synopses of the talk were posted, but videos of the event were elusive... until now. Below you can find the full video of Colin's talk and some points that I think are particularly poignant.
Today Willow Garage announced that eleven (rather than the original ten anticipated) PR2 Beta robots, with a total value of over $4.4M, will be loaned out to academic and research institutions worldwide to develop a slew of impressive capabilities over the next two years. The recipients include 7 US-based institutions, 3 European, and 1 Asian.
Phillip Torrone (senior editor of Make Magazine) and Limor Fried (aka Lady Ada), both of AdaFruit Industries, gave a talk at O'Reilly's Foo Camp East 2010 that unveiled the financials of two robotics-related open hardware projects. First, DIYDrones -- founded by Wired editor-in-chief Chris Anderson and makers of open hardware UAV components like autopilots and IMUs -- is approaching $1M in revenue (est. 2010).
Robotiq is a new Canadian startup spun-out of the Laval University Robotics Lab and founded by Samuel Bouchard, Vincent Duchaine and Jean-Philippe Jobin. Their first product is a very cool looking three-fingered robot hand called the "Adaptive Gripper." It is comprised of three under-actuated fingers, two of which can change their position and orientation to support a variety of grasp configurations -- very similar in principle to the Barrett Hand and Schunk SDH Hand.
IRobot posted amazing first-quarter revenue, driving the stock price up 30% in one day to a new 52-week high. The new stock price is hovering right at $20 per share, up 96% from its late-July low of $10.21 per share. I'm glad too see such a positive turn around, though it is somewhat bittersweet -- I had been considering a purchase of IRBT shares ever since a prescient analysis by "Robot Stock News" in early December, but lacked funds to make the plunge.
This new robot blimp, powered by electroactive polymers (EAPs), comes from the Swiss Federal Labs for Materials Testing and Research (EMPA). It reminds me of the Festo Air Ray, and definitely ranks up there with other cool EAP robots like the Artificial Muscle EPAM variants previously discussed on Hizook. Be sure to check out the video.
[We received the following note from Sonia Chernova @ MIT Media Lab] The Personal Robots group at the MIT Media Lab has released an online game designed to make robots smarter! Mars Escape is a two-player online game in which each player can take on the role of an astronaut or a robot on Mars. The players must work together to complete their mission before oxygen supplies run out.
Depth cameras go by many names: ranging camera, flash lidar, time-of-flight (ToF) camera, and RGB-D camera. The underlying sensing mechanisms are equally varied: range-gated ToF, RF-modulated ToF, pulsed-light ToF, and projected-light stereo. The commonality is that all provide traditional (sometimes color) images and depth information for each pixel (depth images) at framerate. Existing commercial offerings, such as the Swiss Ranger SR4000 and PMD Tech products, currently cost ~$10,000.
This new humanoid robot named "Cody" comes from Georgia Tech's Healthcare Robotics Lab (to which I belong). Cody is composed of a Segway RMP 50 Omni mobile base, 1-DoF vertical linear actuator, and a pair of 7-DoF Meka Arms with series elastic actuators (the same as Simon). This mobile manipulator has shown some pretty impressive capabilities. It can open doors, drawers, and cabinets using equilibrium point controllers developed by Advait Jain and Prof. Charlie Kemp.
Professional and hobbyist roboticists alike are snapping up Robotis Dynamixel Servos. These "smart" servos serve an important niche between $30 hobby servos and super-expensive harmonic drive servos. They sport torques ranging from 12 kg·cm to 106 kg·cm, and even more when doubled-up.
Colleague and labmate, Tiffany Chen, pointed out an interesting new robot named "MeBot" from MIT's Personal Robotics Group. Later this week, MeBot will be presented at the conference on Human-Robot Interaction (HRI 2010) in Osaka, Japan. The associated paper, "MeBot: A Robotic Platform for Socially Embodied Presence," has been nominated for best paper.
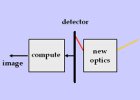
This article is an illustrated summary of a recent paper we presented at CVPR 2009. We leverage some of the linear properties of optical flow fields to develop a method that automatically learns the relationship between camera motion and optical flow from data. The method can handle arbitrary imaging systems including very severe distortion, curved mirrors, and multiple cameras.
Back in 2007 and 2008, funding agencies had a pretty hefty interest in robots with amoeba-like locomotion, also known as whole-skin locomotion (WSL), blob 'bots, or Chembots. NSF awarded $400k to Dr. Dennis Hong of Virginia Tech's RoMeLa Lab and DARPA awarded $3.3M to iRobot to develop such robots. Now, most people are familiar with iRobot's jamming skin robot announced at IROS 2009 (photos / videos below). However, I would like to share with you the equally-clever and interesting work of Dr.
Unmanned aerial vehicles (UAVs) are no longer relegated to military and police forces. Amateurs and hobbyists, working in close-knit online communities, are fusing old RC airplane concepts with modern technology to create UAVs that rival commercial offerings.
Well, it's official. Willow Garage CEO Steve Cousins just announced to the Robotics-Worldwide mailing list that Willow intends to give away 10 PR2 robots. These are some amazingly impressive robots, costing several hundred thousand dollars each. Willow's PR2 robots and open-source Robot Operating System (ROS) have been widely acclaimed by news organizations such as the New York Times, Popular Science, Hizook, and pretty much everyone else. This should be an interesting year for Willow Garage.
I would like to share a piece of work that I think is awesome on so many levels. First, it involves the weakly electric knifefish: a curious creature that maneuvers via ribbon-finned propulsion (a marvel of fluid dynamics) and possesses an uncommon sensing modality in the form of electric field sensing (essentially electrostatic / capacitive sensing).
Autonomously seeking out power for battery recharging is a pretty crucial capability for advanced mobile robots. While Roomba-like docking stations are a quick fix, "plugging in" to existing infrastructures is preferable. Not long ago, the robotics world was abuzz with the Willow Garage Milestone 2, where (among other things) a PR-2 robot plugged itself into 9 different wall outlets.
Having previously written about various artificial muscle technologies, I'd like to examine the electroactive polymer (EAP) variant in more detail. I'll briefly discuss how EAPs function, then move on to myriad examples of EAPs used in robotics applications, including: biomimetic robot eyes, childrens' toys, and flapping-wing ornithopters.
A commercially-available ultra low-cost laser rangefinder is finally set to hit department store shelves in February! I'm speaking of the laser rangefinder presented at ICRA 2008 that costs $30 to build (commented on here at Hizook almost one year ago) that sits atop the recently announced Neato Robotics XV-11 vacuum cleaner.
This is the third installment in what could be billed the "building series." The first two articles focused on rather involved fabrication techniques for larger robots; this time, I'd like to look at two more-accessible techniques for building miniature robots that I learned about at IROS 2009. The first technique, by Jessica Rajkowski and advisor Sarah Bergbreiter (et.
Following up on last week's article about building robot hands with compliant under-actuated fingers, I'd like to examine a technique to build aesthetic shells for robot heads using a combination of 3D-printed master forms, silicone molds, and quick-setting plastic final products.
Building capable robot end effectors, particularly high-complexity hands, can be a daunting challenge. In this article, we will examine the fabrication of a robot hand with compliant, under-actuated fingers that is rugged enough to bounce back from twisting, end-on and side impacts, falls, collisions, and even severe back-bending.
I'm a huge fan of so-called micro robots -- those with cm length scales, thus ? m3. I've posted about numerous micro robots before, including the amazing Alice micro robot swarms from EPFL, and I am a long-time micro and nano autonomous sumo robot advocate (see RoboGames). Perhaps that is why I'm so excited about the SwarmRobot.org open hardware micro-robot swarm, developed by the University of Stuttgart and the University of Karlsruhe.
Meka Robotics is a San Francisco robotics startup founded by MIT roboticists Aaron Edsinger and Jeff Weber, of Domo fame. They have produced some pretty amazing products in the last few years, including the humanoid robot Simon that was recently featured on Hizook. As I'm somewhat familiar with these arms and hands, I'd like to share some more detailed information, including new videos of the torso and a more detailed look at the anthropomorphic hands.
With micro / pico projectors being sold for under $250, and robot toy maker Wowwee getting in the game, it was only a matter of time before projectors would be found on robots -- especially since the general concept dates back at least three decades to R2D2's holographic projections in the original Star Wars trilogy. In fact, Hizook previously examined a number of robots with projectors used to communicate intention.
I'm really intrigued by the recent announcement (Aug. 21st, 2009) that Jeff Bezos, founder of internet giant Amazon, has participated in a substantial $7 million round of funding via his personal investment firm (Bezos Expeditions) into Heartland Robotics, a stealthy startup co-founded by Rod Brooks -- who left iRobot (which he also co-founded) to launch this new venture.
It appears the I-Swarm robot project has produced some fully-integrated and apparently functional micro robots -- almost four years after we saw the initial conceptual videos appear online. What makes these robots so impressive is the level of integration; they possess a micro-step locomotion mechanism, a solar cell, custom IR communication modules, and an ASIC (custom silicon circuitry) all in a very compact package. I've quite impressed by the pictures and videos (embedded below).
The good folks at the AI and Robotics Blog have posted an entertaining video of a Kuka Light-Weight Robot (LWR) arm climbing a ladder -- an impressive feat for such a large arm. Those who read Hizook will recognize these arms as descendants of the DLR-III lightweight arms (featured frequently), also with a 1:1 mass-payload ratio, that have been employed on the Justin research platform.
We've seen robots controlled with projector interfaces and laser-pointer interfaces, and now we can add tabletop interfaces to the list. My labmate, Hai Nguyen, pointed out the CRISTAL project from the Media Interaction Lab at the Upper Austria University of Applied Sciences.
Dr. Andrea Thomaz of Georgia Tech's Socially Intelligent Machines Lab was recently awarded the prestigious "MIT Tech Review 2009 Young Innovators Under 35", an honor shared with last year's robotics recipient, Andrew Ng. Simultaneous to this fantastic news, Andrea's lab unveiled an amazing new robot named Simon (see photos and videos below). Simon features an articulated torso, dual 7-DOF arms, and anthropomorphic hands from Meka Robotics along with an expressive head designed at Georgia Tech.
While perusing through Kuka's 2008 Annual Report, it became evident that the robotics giant is making a serious foray into mobile manipulation with its OmniRob concept robot (photos and videos below). This new robot sports a omnidirectional mobile platform based on mecanum wheels, a Kuka lightweight arm, and what appear to be dual SICK LMS100 laser range finders to provide 360° lidar coverage.
At ICRA 2009, the Rollin' Justin humanoid robot (the lovable robot that "Danced Like in Pulp Fiction") demonstrated some impressive teleoperation capabilities. The man-machine interface (MMI) consists of two components. The first component comprises two DLR-III lightweight arms, the same type employed by the robot, terminated with force-torque sensing load cells to command the omnidirectional base or the arms / hands.
Like almost all roboticists, I'm a huge fan of robot movies. My common favorites include: I-Robot, Blade Runner, Iron Man, Short Circuit, AI, Wall-E, Hinokio, and so on. Well, there is a new Sci-Fi movie called "District 9" coming out this weekend that (based on previews) sports some impressive robotic systems -- particularly exoskeletons. The writer / director of this new movie is Neill Blomkamp, who has also produced numerous short films featuring robots (a few of which are shown below).
I saw a press release by Robosoft (a French company that creates "advanced robotics solutions") with attractive CAD drawings of a robotic walker meant to assist the elderly. I thought this was a good opportunity to examine some of the other robotic solutions in this space, from the more complex Care-O-Bot II from Fraunhofer to the most simplistic passively-breaking walkers that prevent stumbling and excessive acceleration.
By now, most roboticists are familiar with the myriad gecko-type robots that employ Van der Waals forces (created by microscopic synthetic setae) to cling to walls. Less well-known is the work on an electrically-controllable alternative developed by researchers at SRI International (formerly called Stanford Research Institute) called "electroadhesion". Impressively, the electroadhesive can support 0.2 to 1.4 N per square centimeter, requiring a mere 20 micro-Watts per Newton.
A few blogs are passing around videos of the Ishikawa Komuro Lab's high-speed robot hand performing impressive acts of dexterity and skillful manipulation. However, the video being passed around is slight on details. Meanwhile, their video presentation at ICRA 2009 (which took place in May in Kobe, Japan) has an informative narration and demonstrates additional capabilities.
The iconic Pixar animated lamp, Luxo Jr., unofficially debuted in animatronic form at Disney's Hollywood Studios in late June (videos below). Both the animated and animatronic Luxo Jrs. have remarkable anthropomorphic emotive capabilities in spite of their simple, non-human form. This reminds me of conversations in Dr. Andrea Thomaz's human-robot interaction course about applying animation techniques to design more effective social robots -- clearly Disney's Imagineers have perfected this art.
I came upon this new commercial (video below) entitled "The Runner -- Exploit Yourself" created by Big Lazy Robot (a design / visual effects studio) for Nike. The humanoid robot performs impressive feats of urban acrobatics, strongly resembling a more agile version of the movie-star robot, Hinokio. It is always interesting to compare robot fact with fiction. Hopefully the future lives up to (nay, exceeds) our expectations.
There was a very interesting plenary talk at ICRA 2009 about "Computational Cameras" given by Prof. Shree Nayar of Columbia University. A video of the plenary is included below, as well as a discussion of some of its contents -- from assorted pixel techniques for high dynamic range to flexible depth of field photography -- all very cool stuff! These developments are particularly relevant to robotics, as cameras are probably the most ubiquitous sensors encountered.
While most (semi)autonomous mobile manipulators employ expensive articulated arms with grippers (6 or more DOF), the Healthcare Robotics Lab at Georgia Tech, the same folks who made EL-E, are also examining low-complexity end effectors modelled off of dustpans and kitchen turners for non-prehensile grasping of isolated objects from the floor.
I would like to mark this momentous occasion by sharing it with you -- that, and it is just plain cool (and artistic)! The folks at RadiologyArt.com have been building Computed Tomography (CT) scans of various objects (dolls, electronics, vacuum tubes, McDonalds hamburgers, etc). The addition of a remote control dog and wind-up drumming bunny represent (to my knowledge) the first examples of CT scans of robots, albeit rudimentary robots. Read on for pictures and amazingly detailed videos.
There was a paper just released in Science (Materials) about "Giant-Stroke, Superelastic Carbon Nanotube Aerogel Muscles." This is a rare case where I believe the research material far exceeds the buzzword hype! The new material responds to applied voltages by expanding 220% in a few milliseconds, operating in temperatures as low as liquid-nitrogen and as high as the melting point of iron.
Describing science as "beautiful" makes perfect sense to me; I believe the physics experiments described in The Prism and the Pendulum are on par with the greatest paintings and sculptures ever conceived! However, I'm having difficulties classifying the $30,000 robot, Keepon: Is it a research robot, an art-robot, or both? On one hand, there is evidence supporting its role in important robotics research.
While Hizook covered the Rollin' Justin robot over three months ago, the rest of the world (including Engadget) had to wait until CeBIT, where Rollin' Justin "debuted" today. Lots of great pictures and videos were taken, including a video where Rollin' Justin is led around by the hand (I assume using the force/torque sensing capabilities of the DLR-III lightweight arm or the DLR-II hand).
I've been meaning to mention this for some time now... SICK has released a "new" laser rangefinder, the LMS 100. This laser rangefinder seems to be a departure from the classic "coffee-pot" look of yore (i.e. SICK LMS 291). In fact, it's form-factor and specifications are quite similar to the Hokuyo UTM-30LX; it seems like the LMS 100 might be SICK's strategic response to the "budget" LIDAR manufacturer's (Hokuyo's) burgeoning popularity among indoor roboticists.
The Hokuyo UTM-30LX is a newer laser rangefinder from Hokuyo, with improved capabilities compared to its little brother, the Hokuyo URG-04LX (which was very popular among indoor robots). Though it costs almost twice as much at $5600 (from distributors such as Acroname), it has greatly enhanced capabilities. For example, the UTM has an increased scan range of 30 meters, with a 40 Hz scan rate over 270° range and 0.25° angular resolution.
The Hokuyo URG-04LX was the first popular "budget" laser rangefinder from Hokuyo, and has been featured on many indoor robots. It isn't the most capable laser rangefinder; it has a sensing range of only 4 meters and it has detection problems when scanning absorptive surfaces (such as black trimming). However, it possesses a 10 Hz scan rate over 270° range, with 0.36° angular resolution, and it requires a mere 2.5 Watts of power at 5VDC.
Hokuyo is a Japanese company that specializes in "budget" laser rangefinders (LRFs, also known as LIDARs). Unlike industrial laser rangefinder manufacturers (such as SICK), Hokuyo laser rangefinders have gained notoriety in robotics applications (particularly indoor robotics) by focusing on lower-end designs -- namely those that benefit from lower price and lower weight by way of more lax specifications and economies of scale.
The Omron STI OptoShield OS3100 is very similar in form and specifications to the various SICK "coffee-pot" laser rangefinders, such as the SICK LMS 291. Due to my lack of familiarity with this particular laser rangefinder, I have no indication of cost; however, it appears to have a 25 Hz scan rate over 180° range, with 0.36° angular resolution. The sensing range is 4 meters (at 10% reflectivity, max range of 15 meters), with an error of about 62mm.
The SICK LMS 100 is a new laser rangefinder with improved form-factor, power requirements, etc. that is well-tailored to robotic applications; in many ways, it seems to be SICK's strategic response to the Hokuyo line of compact laser rangefinders. The SICK LMS 100 costs approximately $5000, and sports a 50 Hz scan rate over a 270° range, with 0.25° angular resolution. Their sensing range is 18 meters (at 10% reflectivity, max range of 20 meters), with an error of about 20mm.
The SICK LMS 291 is the latest variant of SICK "coffee-pot" laser rangefinders, which comes in a characteristic beige color. The SICK LMS 291 costs approximately $6000 and sports a 75 Hz scan rate over 180° range, with 0.25° angular resolution. Their sensing range is 30 meters (at 10% reflectivity, max range of 80 meters), with an error of about 10mm. Thanks to a rugged metal housing, the LMS 291 is rather bulky (18.5 x 15.6 x 21.0 cm), weighing in at approximately 4.5kg.
SICK is a German-based company that specializes in laser rangefinders (LRFs, also known as LIDARs). The early SICK variants were featured prominently on many robot platforms and were instrumental in the development of Simultaneous Localization and Mapping (SLAM) algorithms. Within industry, SICK laser rangefinders are used extensively for safety and monitoring applications.
Hizook reader Yue Khing pointed us to another disassembled laser rangefinder (LIDAR); this time, it is an Omron STI OptoShield OS3100. This LIDAR seems similar in form (apparently referred to as "coffee pots" in industry) and specification to the SICK LMS laser rangefinders.
As of January 2009, the iBOT powered-wheelchair will be discontinued. This is unfortunate for the disabled community -- Dean Kamen and the others at DEKA (the same people responsible for the Segway and Luke Arm) developed an amazing robotic wheelchair that was (somewhat) unique it its ability to transition from a statically-stable, 4-wheel configuration to a dynamically-stable, 2-wheel configuration to give occupants added height.
I think this is both brilliant and hilarious... University of Delaware researchers, James Galloway and Sunil Agrawal, were awarded a two-year, $325k NSF grant to explore robot-enabled mobility for special needs children, with the goal of spurring cognitive development -- this is brilliant.
Early robots have found utility in warfare dating back to World War II (and arguably earlier), with the invention of simple electrical servo-mechanisms for fire control and targeting. While fire control has become extremely advanced, its "human in the loop" nature kept us (relatively) oblivious of the ethical implications of robots in warfare. However, increased autonomy and point-and-click capabilities are forcing us to reevaluate the ethical implications of robots in warfare.
Friend and colleague, Richard Roberts, has offered to give us an glimpse of his recent work on learning autonomous robot behaviors/controllers from human operators: While working on the DARPA LAGR project, we found it exceedingly difficult to tune our reactive behaviors to work well in cluttered and patchy environments. Either obstacle avoidance was too sensitive and the robot would not drive through gaps, or it was too aggressive and the robot would collide with obstacles.
Alice is a micro robot development by Gilles Caprari at the Autonomous Systems Lab at Ecole Polytechnique Federale De Lausanne, or EPFL -- a University in Switzerland. In a sense, Alice was the culmination of 8 years' worth of research efforts spanning a number of micro robots, including Smoovy, Jemmy, and Inchy. From early on, Alice was designed to be a small, inexpensive, and simply-constructed autonomous micro robot.
Inchy is a micro robot based on the (now discontinued?) smoovy motors. This robot comes from the Microprocessor Systems Lab at Ecole Polytechnique Federale De Lausanne, or EPFL -- a University in Switzerland -- where numerous micro robots (such as Jemmy, Smoovy, and Alice) were developed. The builders of this robot actually went on to found Didel, a provider of micro-robot components (such as the motors for Pico, another micro robot).
Jemmy is a micro robot based on the (now discontinued?) smoovy motors. This robot comes from the Microprocessor Systems Lab at Ecole Polytechnique Federale De Lausanne, or EPFL -- a University in Switzerland -- where numerous micro robots (such as Smoovy, Inchy, and Alice) were developed. The builders of this robot actually went on to found Didel, a provider of micro-robot components (such as the motors for Pico, another micro robot).
This nameless robot has been dubbed "Smoovy", as it was based on the (now discontinued?) smoovy motors. This robot comes from the Microprocessor Systems Lab at Ecole Polytechnique Federale De Lausanne, or EPFL -- a University in Switzerland -- where numerous micro robots (such as Jemmy, Inchy, and Alice) were developed. The builders of this robot actually went on to found Didel, a provider of micro-robot components (such as the motors for Pico, another micro robot).
Pico is an impressive hobbyist robot. It measures in at 2 cm3 (12.5mm per side) and features a laser-cut chassis, two Didel motors (MK04S-24 driving worm gears), an A3901 stepper motor driver, and an ATtiny44 microcontroller. With a run-time of 15 minutes off a 10mAh Li-Poly battery (approx 3.7V), that equates to a power consumption of about 140 mW. I suppose the large power consumption is to be expected, given that the Didel motors employed can use as much as 100mA at 3V!
Back on December 15th, we got a look at the internals of a SICK Laser Rangefinder (LIDAR), a $6k device that employs a single laser diode to produce ~6000 points per second (~600 points per scan at ~10Hz) over a 180° field-of-view. Now, we can compare that to the Rolls Royce of Laser Rangefinders -- the Velodyne Lidar, a $75k device employing 64 laser diodes to produce 1.3 million data points per second with a 360° horizontal field-of-view and a 26.8° vertical field-of-view.
The Situational Awareness Mast (SAM, also known as a Zipper Mast) from Geosystems Inc. is a telescoping linear actuator that has a unique property -- it's stroke length is an order of magnitude greater than its nominal height! For example, the SAM8 is a 10 lb device with a stroke length (8ft) that is 24 times it's nominal height (4 inches)! This can be used to vertically translate a robot's sensor suite for better visibility while still allowing for a low profile.
Back in May 2008 it was announced that CMU professors Sara Kiesler and Jodi Forlizzi (from the HCI Institute) and Paul Rybski (from the Robotics Institute) were awarded $500k in Microsoft's Human-Robot Interaction funding to develop a social, snack-selling robot to traverse Newell-Simon and Wean halls (press release). After seeing a prototype appear on Flickr in July, we've all been waiting patiently to see pictures of the final version.
This is great! Honda is celebrating its 50th year in the US by creating a 49-foot tall Asimo float that will lead off the Rose Parade on January 1st, 2009. To quote the Honda press release: "Honda's Rose Parade float, a 49-foot replica of Honda's ASIMO humanoid robot, and the parade's first-ever hydrogen-powered fuel cell pace car, the Honda FCX Clarity, will lead the 120th Rose Parade as well as kick off Honda's 50th anniversary of U.S.
The 7th International Conference on Field and Service Robotics (FSR) is having their 2009 conference in Cambridge, MA on the MIT campus July 14-16, 2009. The deadline for receipt of papers is February 27th.
I've always wanted to pull apart a SICK laser rangefinder (LIDAR). However, the $6k price-tag (and advisor repercussions) have always been a sufficient deterrent. Well, Kyle Vogt of MIT has disassembled what looks to be a SICK LMS-210 -- perhaps his was already broken? Anyway, the internal design is surprisingly simple. It's interesting to look at the internals of such iconic piece of robotics hardware. Read on for more images.
The folks at Dr. Matsumaru's Bio-Robotics & Human-Mechatronics Laboratory have worked on some very interesting human-robot interaction projects. I'm particularly interested in their video-projector interfaces. In one scenario, the video projector shows the robot's intended motion trajectory. In another scenario, dubbed the "Step-On Interface" or SOI, users step on projected "buttons" to control the robot. According to videos (below), Dr. Matsumaru is targeting home-based service robots.
You may recall Justin, the humanoid robot sporting two DLR-III lightweight arms and two DLR-II hands. Well, Justin has recently acquired a 4-wheel mobile base dubbed "Rollin' Justin". The base utilizes a "powered-caster" design similar to the Willow Garage PR2, except that the torso-caster linkage contains a spring-loaded lift mechanism that gives the base a variable footprint.
Myself and several colleagues are anxiously following the creation of Willow Garage's PR2 mobile manipulation robot. By looking at the progress on WG's blog, it appears they're well on their way to functioning units by early next year; they already have some bases, spines, heads, and even an arm up and running -- read on to see more images from the PR2 "alpha" prototypes.
There has been a lot of press in the last six months revolving around El-E, the autonomous mobile manipulation platform for the motor impaired out of Georgia Tech's Healthcare Robotics Lab (to which I belong). There was a report in the NY Times on El-E's laser-pointer interface, and now a report in MIT Tech Review on El-E behaving like a service dog. Recently, the lab's director (and my advisor) Dr.
I think it is great that the Rotundus GroundBot (a spherical robot) made the Popular Science "Best of What's New in 2008"; however, I'm a bit perplexed... New Scientist featured the spherical robot all the way back in early 2005; how is it "new" now in 2008? Either way, this serves as a convenient time to re-examine this novel robot -- one that brings back memories of the old solar-powered, spherical BEAM robots from Solarbotics (it was called a "miniball," and is now discontinued).
OK, I know what everyone is thinking... "What is this craziness? Inter-Galactic Love?" Well, let's just attribute it to a poor Japanese-English translation -- the title should have been left at just "Hinokio," which is a play on words from the old, classic film title "Pinocchio." In my opinion, this is the second-best robot movie of all time in terms of robot realism and "cool" humanoid robots (second to I-Robot), though it does posses some of those cheesy Japanese memes.
NOTE: Hizook.com has transformed from Travis Deyle's homepage (now here) into a robotics-centric website. We're maintaining old posts (such as the one below) for the health of the internet. We encourage you to scope out the new Hizook!
NOTE: Hizook.com has transformed from Travis Deyle's homepage (now here) into a robotics-centric website. We're maintaining old posts (such as the one below) for the health of the internet. We encourage you to scope out the new Hizook!
NOTE: Hizook.com has transformed from Travis Deyle's homepage (now here) into a robotics-centric website. We're maintaining old posts (such as the one below) for the health of the internet. We encourage you to scope out the new Hizook!
Back on October 10th, John Leonard gave a Georgia Tech Robotics Institute talk about MIT's DARPA Urban Grand Challenge experience. The MIT entry, a Land Rover LR3 named Talos, came in fourth place overall (out of 6 finishers and 11 qualifiers). I thought the most interesting aspect of the design was that it was originally intended to be a "low cost" solution (meaning many $6k SICK lidars, low-cost cameras, and radars), but that ultimately the success of the design hinged on the use of the $75k...
The 2009 Robotics: Science and Systems conference has announced their call for papers (and workshops). RSS is one of the premier robotics conferences, and it is being held from June 28th through July 1st at the University of Washington in Seattle. The paper submission deadline is January 15h, and the deadline for workshop topic submissions is December 15th.
Troody is a 16 DOF autonomously powered and controlled biped robot built to resemble a Troodon, a small carnivorous dinosaur that lived in the Cretaceous. Troody remains one of my favorite robots of all time; when I was younger, its bio-inspired design (based off of actual fossil aspect ratios) and its lifelike movements were inspirational.
One of the newest offerings from Segway is the RMP 50 Omni, a trimmed down version of the RMP 400 Omni. This platform has mecanum wheels which give the base the ability to drive forward, backward, right, left, and turn independently. It is a capable mobile base in a sleek and low profile package, but this product doesn't come with all the features one would expect from a $21,000 platform.
Researchers at Georgia Tech (labmates of this author) have developed a robot that can robustly open closed doors. The target application for the robot, named El-E ("Ellie"), is assistive tasks related to healthcare in the homes of the disabled. This application demonstrates a set of behaviors that enable a mobile manipulator to reliably open a variety of doors and traverse doorways using force-sensing fingers and a laser range finder.
During the Spring 2007 semester, several friends (and labmates) took a course at Georgia Tech on mobile manipulation. This was no ordinary class... the final exam's assignment was to use a Segway base with KUKA arm to fetch a cup of coffee! There are a ton of reasons that this is interesting, from mobility, navigation, perception, manipulation, etc. However, the most impressive thing is that each group used different software to complete the task.
Festo is known as a top-notch automation hardware manufacturer, but apparently their research division is capable of making very artistic, bio-inspired robots as well. This post specifically examines their robotic dirigible and submersible manta rays, both of which harbor a life-like gracefulness. I encourage you to check out the videos below; the technical specifications are provided for good measure.
Back in November of 2007, I saw a presentation by Professor Siciliano from University of Naples where he briefly mentioned (and had a video) of a very cool humanoid robot named Justin. I've seen a lot more of DLR-III lightweight arms now that DLR and Kuka are working together to push them out into industry; though I must admit that I like Justin's blue arms compared to the characteristic Kuka-orange.
Kuka unveiled two prototype products at IROS 2008 in September, both ultimately targeting educational use. The first product was very sleek holonomic (omnidirectional) base employing mecanum wheels. The second product was a cute little 5 DOF (plus 1 DOF gripper) arm. While the Kuka representatives mentioned possible price-points of $3,500 for the base and $4,000 for the arm, there was no mention of a timetable.
There has been a lot of discussion recently by Intel's CTO (Justin Rattner) about some really compelling future technologies: wireless power and programmable matter (made of catoms). Of course, the programmable matter (catoms) he is discussing are basically robots operating as a swarm.
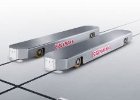
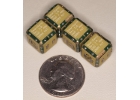
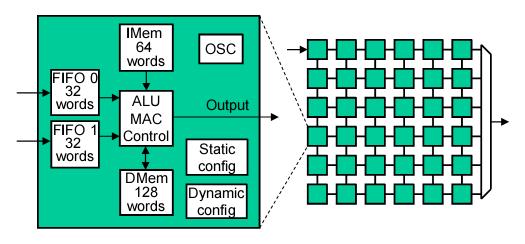
This paper from ICRA 2008 details the construction of a 60cm x 60 cm surface that provides wireless (battery-free) power and bidirectional communication to an initial swarm consisting of five line-following robots, each consuming 200 mW. Power transmission in the system was achieved through magnetic flux coupling between a high Q L-C resonator placed beneath the operating surface and a non-resonant pickup coil on each robot.